Innovation for Industry 4.0 Login
Advanced Manufacturing

| ENG
Le imprese che stanno trasformando i propri processi produttivi secondo i nuovi canoni della robotica collaborativa hanno spesso difficoltà a pensare alla progettazione in quest'ottica, e a sondare l'efficacia delle proposte sui loro use-case comparando soluzioni alternative; questo rende necessaria la disponibilità di testbed realistici di robotica cooperativa, che consentirà una prototipazione rapida delle nuove celle produttive e l'ottimizzazione delle scelte e dei costi.
Il CrossLab Advanced Manufacturing mette a disposizione delle imprese un insieme - unico in Italia e raro in Europa - di attrezzature avanzate e competenze di avanguardia per progredire nella ricerca e trasformarla in innovazione reale. Il focus del laboratorio è su metodologie e tecnologie per l'utilizzo di squadre di robot mobili, in particolare nella logistica in ambiente misto robot/operatori umani, e nei compiti di ispezione autonoma per manutenzioni predittive industriali in zone ad accesso impervio o in emergenze; ricerca metodologica e sperimentale su robot manipolatori per l'interazione fisica uomo-macchina finalizzata alla produzione collaborativa (Co-Botica), basata su metodi quantitativi di valutazione del rischio di coesistenza e su tecnologie innovative come la soft robotics.
Tour Virtuale del Lab
Scarica il Concept
Strumentazione |


Muletto autonomo per il trasporto automatizzato di pallet in
ambiente industriale.
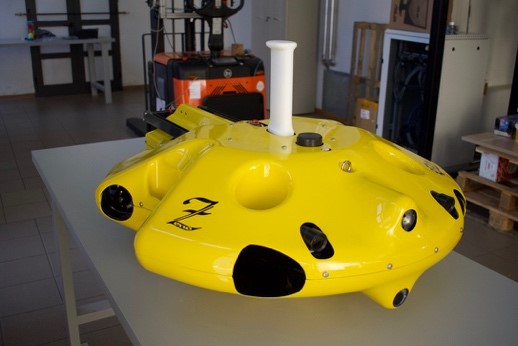
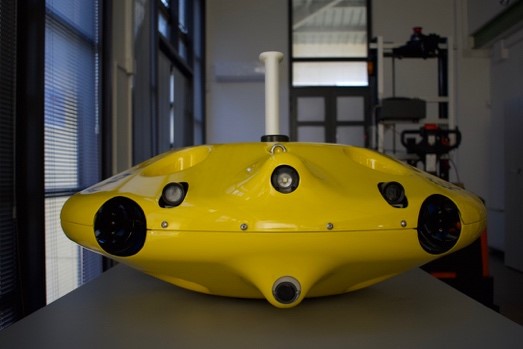


Drone subacqueo (ZENO) per monitorare i fondali marini o le chiglie delle navi

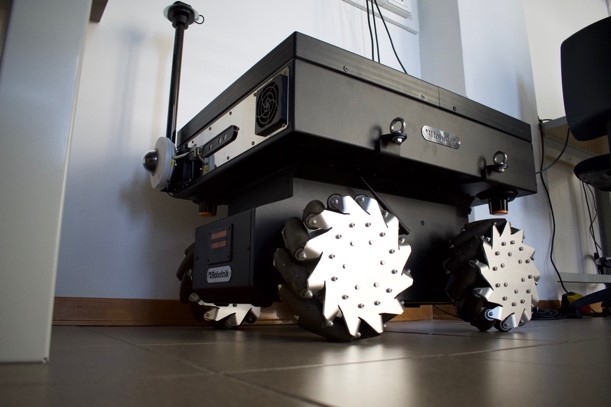
Veicolo omnidirezionale (Robotnik) per l’esplorazione, il monitoraggio e la
movimentazione di merci in ambienti industriali

Sistemi eterogenei multi-robot per il monitoraggio degli ambienti industriali
attraverso i numerosi e differenti sensori che hanno a bordo.

Manipolatore Bi-manuale per compiti di movimentazione e pallettizzazione merci in ambito
industriale.


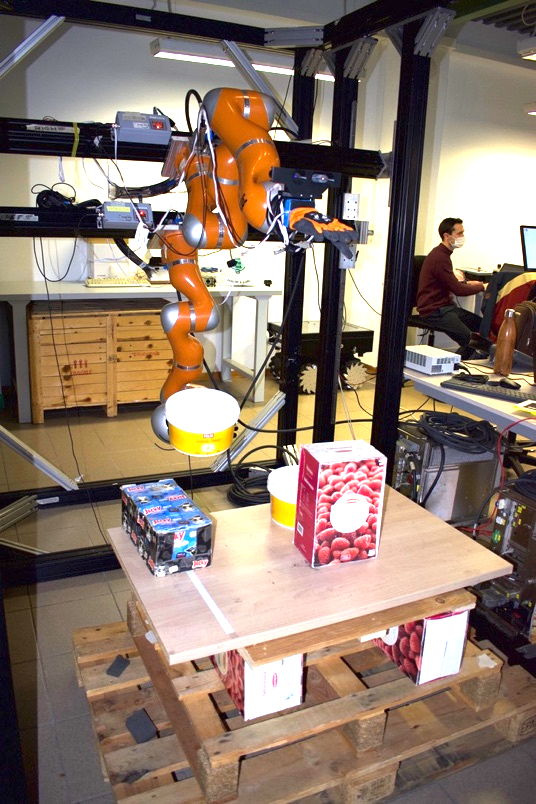
Franka Emika Panda e UR10 entrambi con la Pisa/IIT SoftHand per la
manipolazione di oggetti anche in cooperazione con l’uomo.
Progetti

Coordinatore
Paolo Salaris - paolo.salaris@unipi.it

