Innovation for Industry 4.0 Login
Advanced Manufacturing Lab
| ITA
Companies that intend to transform their production processes according to the new paradigm of collaborative robotics often find it difficult to think about design and to test the effectiveness on their use-cases by comparing alternative solutions. This process requires the availability of realistic cooperative robotics testbeds that allow rapid prototyping of new production cells and optimization of choices and costs.
The CrossLab Advanced Manufacturing plays the role of a facility by providing companies with a set - unique in Italy and rare in Europe - of advanced technologies and cutting-edge skills to advance research that can be concretely transformed in real and concrete innovation. The focus of the laboratory is on methodologies and technologies for heterogeneous mobile robot teams, in particular in cooperative human-robot intralogistics environments, and in autonomous inspection tasks for industrial predictive maintenance, especially in inaccessible areas or in emergency scenarios; methodological and experimental research on fixed/mobile manipulators for physical human-machine interaction aimed at advanced manufacturing systems such as palletizing, re-palletizing and unwrapping as well as at collaborative production (the so-called Co-Robotics), based on quantitative methods for risk assessment as well as on innovative technologies such as soft robotics for agile co-production.
Lab Virtual Tour
--> Download the Concept
Equipment |


Autonomous forklift for the automated transport of pallets in an
industrial environment.
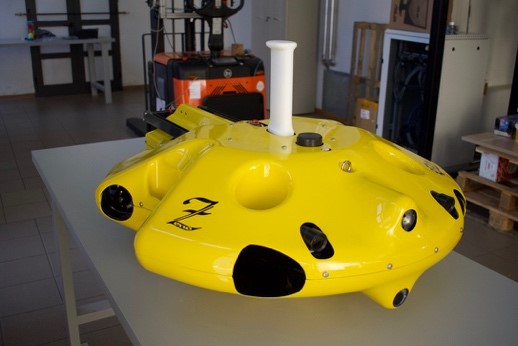
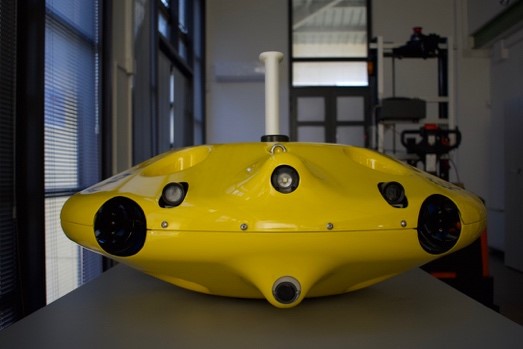


1 underwater drone (ZENO) for monitoring the seabed and keels of ships

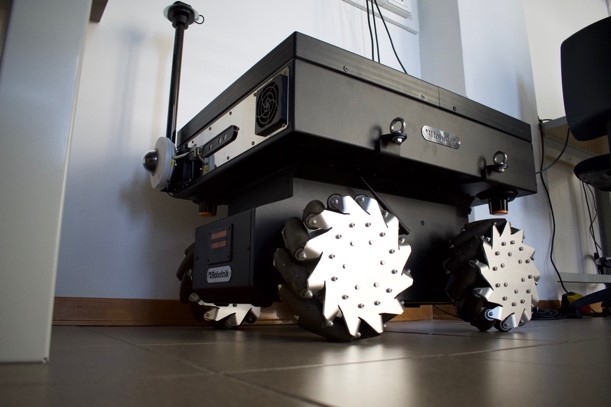
1 mobile vehicle (Robotnik) for exploration, monitoring, manipulating and moving
goods in industrial environments

Heterogeneous robotic teams for monitoring the industrial environments
by using the heterogeneous onboard sensors

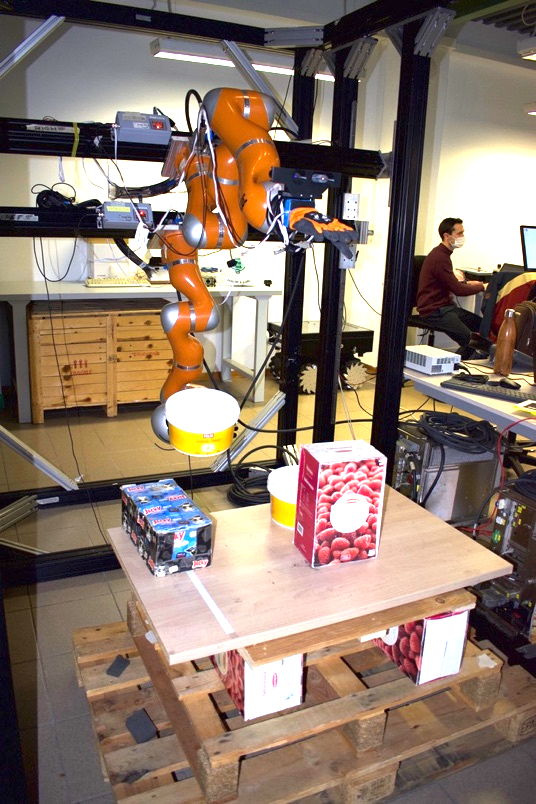
Bi-manual manipulator. For goods handling and palletizing tasks.


Franka Emika Panda with the Pisa/IIT SoftHand and UR10 with the Pisa/IIT
SoftHand for manipulation tasks also in cooperation with humans.
Coordinator
Paolo Salaris - paolo.salaris@unipi.it

